فناوری اطلاعات,,,,الکترونیک


|
| |
| وب : | |
| پیام : | |
| 2+2=: | |
| (Refresh) | |
![]() خبرنامه وب سایت:
خبرنامه وب سایت:
 آمار
وب سایت:
آمار
وب سایت:
بازدید دیروز : 0
بازدید هفته : 7
بازدید ماه : 94
بازدید کل : 17800
تعداد مطالب : 187
تعداد نظرات : 8
تعداد آنلاین : 1
Template By: LoxBlog.Com

به وبلاگ الكتروIT خوش آمدید
دنیای بازی های جدید
 وب سایت رسمی فرهاد مجیدی
وب سایت رسمی فرهاد مجیدی
HMFun.loxblog.com
kharide sharj hamrahe aval
دانلود بازی های کامپیوتری
فناوری اطلاعات
انجمن مهندسین برق و الکترونیک آمریکا
پرسه های شیشه ای
همگام سازی شکری
سایت اطلاع رسانی کنفرانس ها
سایت آموزش مجازی مدارس امریکا
وبلاگ تخصصی کامپیوتر
دانشگاه تهران
روزنامه جام جم
هفته نامه عصر ارتباط
جدول زیبای مندلیف با جزئیات بیشتر
علم روز دنیا
اخبار IT
اخبار فناوري اطلاعات
آموزش زبان انگليسي
واژه نامه c.p.h
بانک کد های طراحی سایت+ابزار فلش+دانلود نرم افزار
بانک کد های طراحی سایت+ابزار فلش+دانلود نرم افزار
ترجه آنلاين متون
انجمن رباتيك
مرجع برنامه نويسي
دانلود مقالات رايگان
فني لرن
آموزش آنلاين زبان هاي خارجي
دانلود رايگان كتاب
دانلود نرم افزار
وبلاگ تخصصي برق
عنوان لینک
دنياي الكترونيك
ردیاب خودرو
![]() تبادل
لینک هوشمند
تبادل
لینک هوشمند
![]()
برای تبادل
لینک ابتدا ما
را با عنوان
الكترو IT
و آدرس
subphonix.LXB.ir
لینک
نمایید سپس
مشخصات لینک
خود را در زیر
نوشته . در صورت
وجود لینک ما در
سایت شما
لینکتان به طور
خودکار در سایت
ما قرار میگیرد.
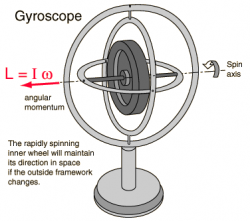


ژیروسکوپ (جایرو)
چکیده:
ژیروسکوپ (جایرو)،عضو اصلی سامانه های هدایت اینرسی است که برای اندازه گیری مقدار و سرعت دوران و ایجاد محور های مختصات مرجع در وسایل نقلیه هوایی،فضایی و دریایی (مانند هواپیما،موشک،ماهواره،فضاپ یما،کشتی و زیردریایی)استفاده می شود.با استفاده از این وسیله میتوان جهت یا محورهای ثابتی را برای وسیله نقلیه تعریف کرد که هرگونه حرکت زاویه ای وسیله نقلیه نسبت به محورهای آن سنجیده شود.در این مقاله،ضمن معرفی ژیروسکوپ،انواع آن مورد بررسی قرار گرفته و به اختصار درباره هر یک توضیحاتی ارایه میشود.
1-مقدمه
از دوران کودکی به خاطر داریم که وقتی فرفره ی کوچکی را با کمک نیروی انگشتان خود می چرخانیم فرفره حول محورش و روی نوک تیز خود شروع به چرخش میکرد.بدون چرخش فرفره،امکان ایستادن فرفره روی نوکش وجود نداشت.در واقع چرخش فرفره حول محورش موجب پایداری و حفظ جهت فرفره میشد.این توضیح ساده مبنای کارکرد ژیروسکوپ های مکانیکی میباشد و از ان منظر،زمین نیز یک ژیروسکوپ است که به علت دوران ،محور خود را در فضا ثابت نگه میدارد.
طبق اصل بقای اندازه حرکت زاویه ای،هر جسم متقارن در حال چرخش سعی دارد جهت خود را همواره در فضا حفظ کند.از این رو اگر یک جسم متقارن را با دور بالا بچرخانیم و اطراف آنرا با یاتاقان و بلبرینگ آزاد بگذاریم که نیروهای خارجی بر آن اعمال نشود،یا چرخش قابی که جسم درون آن دوران میکند،جهت چرخش جسم دوار تغییر نمی کند،بنابراین میتوانیم با کمک این وسیله در اجسام متحرک جهت چرخش جسم دوار تغییر نمیکند،بنابراین میتوانیم با کمک این وسیله در اجسام متحرک جهت ثابتی داشته باشیم که وضعیت فعلی خود را درهر لحظه با آن مقایسه نماییم و لذا موقعیت زاویه ای و محاسبه سرعت تغییر سرعت زاویه ای را بدست آوریم.
عضو اصلی ژیروسکوپ های مکانیکی،یک دستگاه دوار یا روتور است که معمولا با سرعت زیاذ حول محور تقارن خود دوران میکند این سرعت از 3000تا 300000 دور در دقیقه می باشد لذا در اثر اینرسی جرم دوار،اندازه حرکت(ممنتوم)نشبتا بزرگی ایجاد میشود.اگر یاتاقان بندی محور چرخش را در طوقه ای معلق تعبیه کنیم به نحوی که گشتاور خارجی به آن وارد نشود،با وجود تمام حرکت های قاب،محور چرخش روتور همواره به جهت ثابتی اشاره میکند و موقعیت خود را در فضا حفظ میکند.با این روش میتوان جهت و یا محورهای ثابتی را برای وسیله نقلیه تعریف کرد که هرگونه حرکت زاویه ای نسبت به این محورها سنجیده شود.
2-تاریخچه
کلمه ژیروسکوپ واژه ی یونانی است که از دو بخش جایرو به معنای دوران و اسکوپ به معنای نشان دادن است.به این ترتیب معنای تحت اللفظی آن دوران نما است که بیان گر وظیفه آن نیز میباشد.نخستین پدیده ی ژیروسکوپی ،125 سال قبل از میلاد حضرت مسیح توسط ایرخوس کشف شد.تا زمان نیوتن یعنی اواخر قرن 17 میلادی،تنوع چندانی در این خصوص صورت نگرفت.اما در قرن 18،برخی محققین مانند اولر،تحقیقات قابل ملاحظه ای در دینامیکی اجسام دوار صورت دادند.در همین قرن،در انگلستان درباره ایجاد یک افق مصنوعی برای کشتی ها،بررسی هایی عمل آمد.به این منظور از یک قرقره دوار استفاده شد که یک آینه مسطح مصنوعی برای کشتی ها،بررسی هایی عمل آمد. به این منظور از یک قرقره دوار استفاده شد که یک آینه مسطح عمود بر امتداد محور چرخش آن قرار داشت.
در اواسط قرن 19،فوکو،دانشمند فرانسوی برای نشان دادن دوران زمین از یک ژیروسکوپ استفاده کرد که این ار بعلت نداشتن یک موتور الکتریکی مناسب ،به شکل دقیقی انجام نگرفت.همین دانشمند بود که برای نخستین بار در سال 1852 میلادی نام ژیروسکوپ را برای آن برگزید و در سال 1900 شخصی آلمانی به نام آنشوش کامف تصمیم به ساختن زیر دریایی برای کاوش در قطب شمال گرفت.اما وسایل هدایت و راهیابی دقیق برای این کار وجود نداشت.به ویژه قطب نماهای مغناطیسی در محدوده قطب شمال به دلیل وجود میدان های مغناطیسی قوی،از دقت و عملکرد صحیح می افتادند.از این رو تلاش کرد تا قطب نمای دیگری که مستقل از خواص مغناطیسی عمل کند �بسازد . تلاش وی منجر به به ساخت قطب نمایی شد که بر اساس خواص ژیروسکوپی کار میکرد و آنرا قطب نما قطب نمای ژیروسکوپی نام نهادند.این قطب نما،در واقع نخستین وسیله دقیق هدایت و راه یابی است که بر اساس اصول اینرسی کار میکرد. پیشرفت صنعت و پدیدار شدن وسایل نقلیه فضایی،لزوم ابداع و هدایت و کنترل دقیق را بیش از پیش آشکار ساخت.به ویژه وقوع جنگ جهانی اول و دوم و تولید نسل های جدید انواع هواپیما و موشک ها،دانشمندان و محقیقین را به نحو بارزی بر آن داشت تا در زمینه ابداع وسایل دقیق تر و با کیفیت بالاتر تلاش بیشتری صورت دهند.قدم اساسی دراین زمینه طی جنگ جهانی دوم در دانشگاه ام آی تی آمریکا برداشته شد که تحت سرپرستی شخصی به نام چارلز دراپر،ژیروسکوپ هایی دقیق و کوچک برای نصب روی هواپیما ساخته شد که بخاطر مین تلاشهایش او را آقای جایرو لقب نهادند.پس از جنگ جهانی دوم،روش هدایت و ناوبری اینرسی به عنوان روشی دقیق و قابل اعتماد برای هدایت وسایل فضایی ساخته شد.نخستین سامانه هدایت که بطور کامل بر مبنای اصول اینرسی توسط ژیروسکوپ ها و شتاب سنج ها عمل می کرد و در آن از یاتاقان های گازی برای تعلیق طوقه ها استفاده شده بود،در سال 1950مورد آژمایش پروازی قرار گرفت.امروزه نیز سامانه هدایت اینرسی ،بعنوان یکی از مهم ترین روشها برای هدایت و کنترل در امر هوانوردی و فضانوردی و همچنین هدایت هدایت موشک ها،کشتی ها و زیردریای ها بطور گسترده مورد استفاده قرار دارد و به تبع این امر،انواع مختلفی ازژیروسکوپ ها و شتاب سنج ها اختراع ششده اند که درین مقاله به آنها پرداخته خواهد شد.
3- اساسی انواع ساختمان ژیروسکوپ
ژیروسکوپ از نظرساختمان به دو دسته یک درجه آژادی و دو درجه آزادی تقسیم میشود که درین تقسیم بندی ها،توانایی حرکت روتور نسبت به چارچوب یا بدنه ژیروسکوپ مورد نظر است.اگر روتور علاوه بر حرکت دورانی خود حول محور چرخش،بتواند حول یک محور دیگر دوران کند،به آن ژیروسکوپ یک درجه آزادی میکویند و چنان چه بتواند حول دو محور دیگر د.ران کند،به آن ژیروسکوپ دو درجه ای اطلاق میشود. درینجا به اختصار به معرفی هر یک ازین ژیروسکوپ ها می پردازیم.
3-1-ژیروسکوپ دو درجه آزادی
این ژیروسکوپ نخستین نوع ژیروسکوپ است و بیش تر در سامانه های کنترل آتش،وسایل کنترل موقعیت و قطب نماهای ژیروسکوپی از آن استفاده میشود.این نوع ژیروسکوپ را( ژیروسکوپ دو محوره)یا (ژیروسکوپ سه بدنه ای )نیز مینامند.این نوع ژیروسکوپ ،افزون بر محور چرخش روتور دارای دو محور دوران دیگر نیز میباشد که توسط دو عدد طوقه معلق درونی و بیرونی فراهم شده است و در حالت عادی محور چرخش و این دو نسبت به هم متعامد هستند.مجموعه طوقه داخل(که در واقع تکیه گاه چرخش را فراهم میکند)،محور چرخش و روتور را مجموعه دوار میگویند.تکیه گاه های طوقه داخلی در طوقه خارجی قرار دارد که میتواند در ان دوران کند.طوقه خارجی نیز به نوبه خود،درون تکیه گاه هایی قرار دارد که در بدنه ژیروسکوپ تعبیه شده و میتواند داخل آنها حرکت دورانی داشته باشد.برای اندازهگیری حرکت های محور چرخش حول دو محور طوقه داخلی و خارجی از نوع حس کننده-که در امتداد این محور ها سوار شدخ است-استفاده میشود.همچنین برای ایجاد حرکت های عمدی و مشخص و اندازه گیری شده محور رخش حول این دو محور،از وسایل محرکه مختلفی مانند مولد گشتاور استفاده میشود.
3-2-ژِیروسکوپ یک درجه آزادی
ژیروسکوپ یک درجه آزادی،نوع تکمیل شده ژِیروسکوپ دو درجه آزادی بوده و پس از آن به وجود آمده است.درین نوع ژیروسکوپ،سه محور متعامد مشخص وجود دارد که عبارتند از محور ورودی(که بدنه حول آن دوران میکند)محورخروجی(که محور دوران طوقه نسبت به بدنه است)و محور چرخش در ابتدا این سه محور کاملا بر هم عمودند.روتور این نوع ژیروسکوپ،به جز حرکت حول چرخش،تنها میتواند حول یک امتداد دیگر یعنی امتداد محور طوقه داخلی،دوران نماید(نسبت به بدنه جایرو)ژیروسکوپ سک درجه آزادی را میتوان در حالت کلی به سه دسته تقسیم کرد:
ژیروسکوپ های سرعتی:درین نوع،عامل بازگرداندن طوقه مجموعه دوار به وضعیت اولیه،سک نصر الاستیک مانند فنر است و برای تعیین سرعت زاویه ای وسیله نقلیه ای-که ژیروسکوپ روی آن سوار شده-بکار مسرود و در چنین حالتی،محور ورودی عمود بر دو محور چرخش و طوقه است.
ژیروسکوپ های انتگرالی: درین نوع،عامل اصلی مقاومت در برابر دوران طوقه مجموعه دوار حول محور خودش نسبت به بدنه ژیروسکوپ،گشتاور ناشی از دمپینگ سیالی با لزجت بالا است و برای اندازه گیری جابجایی دورانی بکار میرود.درین ژیروسکوپ،چون مجموعه دوار در یک سیال شناور است،اصطکاک تکیه گاه های محور خروجی کاهش میابد و در نتیجه خطای ژیروسکوپ کم میشود.
ژیروسکوپ های مقید: چنانه در زیروسکوپ انتگرالی از سیال با لزجت کم و یا گاز استفاده میشود،درین صورت واکنش قابل توجهی به عنوان گشتاور ناشی از دمپینگ سیال نداریم و تنها عاملی که سعی میکند از خارج شدن طوقه از وضعیت اولیه جلوگیری کند،واکنش اینرسی مجموعه دوار است.به چنین ژیروسکوپ هایی،ژیروسکوپ مقید میگویند.
4-تقسیم بندی ژیروسکوپ ها
علاوه بر تقسیم بندی بر حسب تعداد درجات آزادی،ژیروسکوپ ها را میتوان بر حسب نوع کاربرد نیز تقسیم بندی نمود.براین مبنا،ژیروسکوپ ها به چهار رده تقسیم میشوند.
4-1-ژیروسکوپ هایی که در بخش هدایت و ناوبری کاربرد دارند:
وظیفه اصلی این ژیروسکوپ ها،ایجاد امتداد هایی معین در فضای اینرسی است.این نوع ژیروسکوپ ها،بسیار دقیق بوده و توانایی حس کنندگی بالایی دارند.خطای آنها کم بوده و بیشتر در هواپیما ها،بالگردها،فضا پیماهاو موشک های دوربرد به کار میرود.
4-2-ژیروسکوپ هایی که در بخش پایداری و کنترل بکار میرود:
وظیفه این نوع ژیروسکوپ ها،حس کردن و کنترل حرکات زاویه ای است.این ژیروسکوپ ها نیاز به دقت های بکار رفته در ژیروسکوپ های نوع4-1 را ندارد.این نوع ژیروسکوپ ها در هواپیماها و موشک ها بکار میرود که البته وظیفه آنها نسبت به ژیروسکوپ های هدایت و ناوبری متفاوت است.
4-3-ژیروسکوپ هایی که در درگیری،هدف یابی و در پاییداری و کنترل آنتن وسائل فضایی بکار میروند:
این نوع ژیروسکوپ،در موشک هایی که صفحه رادار آنها روی هدف قفل میشود و به این ترتیب،موشک را تا رسیدن به هدف هدایت میکند،کاربرد دارد.
4-4-ژیروسکوپ هایی که برای تجزیه تحلیل اطلاعات پروازی(در حین پرواز یا پس از آن)بکار میرود.
5-انواع ژیروسکوپ
5-1-ژیروسکوپ های DTG:
این ژیروسکوپ که بر اساس اندازه حرکت زاویه ای عمل میکند،تقریبا در سال 1960 ابداع شد.درین ژیروسکوپ،عامل اصلی دوران،یک موتور الکتریکی است که محور دوار آن توسط زوج میله دیگری با خاصیت فنر پیچشی دارند-به طوقه متصل شده است.خود طوقه نیز توسط زوج میله دیگری با خاصیت فنرپیچشی به روتور-که بر خلاف انواع پیشین در قسمت بیرونی طوقه قرار دارد-متصل است.خاصیت این دو زوج میله های فنری این است که در یک سرعت خاص از دوران-که به آن حالت تشدید میگویند-عملکرد آنها به گونه ای است که دستگاه مانند یک ژیروسکوپ روتور آزاد عمل میکند.این ژیروسکوپ ها از نظر ابعاد بسیار کوچک و سبک هستند.
5-2-ژیروسکوپ های لیزری:
این ژِروسکوپ،بر خلاف ژیروسکوپ های قبلی دارای هیچ جسم تحرکی که ایجاد اندازه حرکت خطی یا زاویه ای کند نیست.لکن از آنجا که کاربرد آن شبیه ژیروسکوپ های معمولی برای اندازه گیری دوران است،آن را در زمره ژیروسکوپ های رده بندی میکنند.درین ژیروسکوپ از دو پرتو نورلیزر در یک مسیر بسته و در دو جهت مخالف استفاده میشود.نخستین نمونه تجاری آن در هواپیماهای بوئینگ 757-756و ایرباس310 بکار رفته است.مزیت آن،درقابلیت اطمینان بیشتر،دامنه دینامیکی وسیع ترو مقاومت خوب در مقابل شتاب های زیاد است.
5-3-ژیروسکوپ های فیبر نوری:
این ژیروسکوپ ، تحقق آخرین اندیشه های بشردر ساخت ژیروسکوپ است.چرا که در نوع خود کوچک بوده و بطور آنی روشن میشود،عمر طولانی دارد،احتیاجی به خدمات نگهداری نداشته و ارزان است.همچنین احتیاج به سامانه تعلیق طوقه ای ندارند.مبنای عملکرد این ژیروسکوپ،شبیه ژیروسکوپ لیزری است،با این تفاوت که در آن به جای لیزر از یک نور پولاریزه استفاده میشود.این فناوری در اواسط دهه ی 1970 در دانشگاه یوتای آمریکا ابداع شد.
 نويسنده : niloofar |
تاريخ : جمعه 9 تير 1391برچسب:, |
نويسنده : niloofar |
تاريخ : جمعه 9 تير 1391برچسب:, |

ایکس باکس وان در مقابل پلی استیشن ۴
بازی های مناسب آی پد
افزایش سرعت انتقال داده
نحوه انتخاب یك رنگ
كنترلهای Guides & Grid
كنترلهای Plug – Ins
نحوه استفاده از جعبه ابزار
نحوه استفاده از پالتهای Photoshop و ImageReady
معرفی محیط نرم افزار
Mail merge چيست ؟
ترفند: دسترسی سریعتر به دکمهها در آفیس 2007
چگونگی استفاده از ابزارهای كمكی آفیس
چگونه دادهها را Cut، كپی و Paste كنیم
چگونه دادهها را پیوند دهیم و تعبیه كنیم
چگونه اجزای آفیس را اضافه و حذف كنیم
عکس هفته
باز هم پای خورشید در میان است
نانو در لاستیک سازی
فناوری نانو در لباس ها